Posted on Tháng Năm 21, 2015 by Cung cấp thiết bị tự động hóa
Tập đoàn Yaskawa electric là một nhà sản xuất của Nhật Bản về servo, biến tần cho động cơ, bộ điều khiển chuyển động, công tắc và rô bốt công nghiệp. Người máy của Yaskawa làm nhiệm vụ robot công nghiệp nặng được sử dụng trong hàn, đóng gói, lắp ráp, sơn, cắt, xử lý vật liệu và tự động hóa chung.
Công ty được thành lập vào năm 1915, có trụ sở chính nằm ở Kitakyushu, tỉnh Fukuoka. Thương hiệu YASKAWA được đăng ký năm 1969 về ” Cơ điện tử” , và được phê duyệt vào năm 1972. Trụ sở chính ở Kitakyushu, được thiết kế bởi kiến trúc sư người Mỹ Antonin Raymond vào năm 1954.
Công ty được niêm yết trên sàn chứng khoán Tokyo và Fukuoka và là một thành phần của chỉ số chứng khoán Nikkei 225.
Robot công nghiệp cho các quy trình công nghiệp khác nhau
Hệ thống kỹ thuật sử dụng trong
Nhà máy thép
Hệ thống xã hội (lưu thông nước, bảo tồn năng lượng, phòng chống thiên tai, hệ thống mega-mặt trời, các hệ thống phát điện hybrid và hệ thống quản lý năng lượng)
Môi trường và năng lượng (thiết bị phát điện)
Điện (phân phối thiết bị điện) điện tử công nghiệp
Công Nghệ Thông Tin
Hệ thống kinh doanh
Thành phần nhúng
Mạng truyền thông
Multimedia
Đánh dấu hệ thống
Dịch vụ phục hồi dữ liệu
Giải pháp thiết bị
YASKAWA có nhiều ĐẠI LÝ trên thế giới. Công Ty TNHH Yaskawa Electric Việt Nam được thành lập năm 2010
Ngành nghề kinh doanh: Tự Động Hóa – Hệ Thống và Thiết Bị Tự Động Hóa, Biến Tần (Inverter)
Posted on Tháng Hai 9, 2015 by Cung cấp thiết bị tự động hóa
Mặc dù phải chịu rất nhiều ảnh hưởng từ suy thoái kinh tế và nhận thức văn hoá, nhưng robot vẫn là thành phần chủ chốt trong tự động hoá công nghiệp. Theo ước tính của Liên đoàn robot quốc tế (IRF), hiện nay trên thế giới có khoảng 50% số lượng robot được sử dụng tại châu Á (trong đó Nhật Bản chiếm 30%), 32% ở châu Âu, 16% ở Bắc Mỹ, 1% ở Australia và 1% ở châu Phi.
Trong đó, robot được sử dụng trong các ngành chế tạo ôtô chiếm 33,2%, ngành unseecified chiếm 25%, ngành điện-điện tử 9,9%, ngành hoá chất + cao su + nhựa chiếm 9,4%, ngành chế tạo máy 4,3%, ngành điện tử viễn thông chiếm 2,5%, sản xuất metal chiếm 3,7%, ngành sản xuất gỗ 2,5%, và các ngành khác là 10,3%.
Robot công nghiệp-thành phần chủ chốt để tự động hoá
Tính linh hoạt trong vận hành; hoạt động tinh vi, nhanh và chuẩn xác; có khả năng thay thế con người làm việc trong môi trường độc hại và không an toàn là những yếu tố quyết định cho việc sử dụng robot trong sản xuất công nghiệp. Trên thế giới hiện nay, robot chuyên dụng và robot tự trị được sử dụng chủ yếu trong các ngành chế tạo ôtô, công nghiệp điện và điện tử, chế tạo máy và công nghiệp chế biến thực phẩm, sản xuất vật liệu xây dựng, luyện kim, chế tạo cơ khí, công nghiệp đóng tàu, an ninh quốc phòng và một vài lĩnh vực khác như thăm dò khai thác biển…
Trong sản xuất vật liệu xây dựng, robot được sử dụng cho dây chuyền nghiền than tại các lò luyện cốc, một điển hình về môi trường độc hại, khói bụi và nhiệt độ cao, ảnh hưởng lớn đến sức khỏe con người. Trong dây chuyền sản xuất kính, robot bốc xếp thay thế công nhân ở công đoạn lấy và sắp xếp sản phẩm. Trong công đoạn đúc kim loại ở các nhà máy cơ khí và luyện kim, robot được sử dụng chủ yếu ở các khâu rót kim loại và tháo dỡ khuôn – những khâu nặng nhọc, dễ gây tai nạn. Trong công nghiệp đóng tàu, robot chiếm tỷ trọng lớn, có ý nghĩa quyết định đến năng suất và chất lượng sản phẩm trong công đoạn hàn và cắt vỏ tàu ở phần đuôi. Các robot tự trị nhận dạng vết hàn phục vụ cho việc tự động hoá một số công đoạn hàn trên boong và bên trong thân tàu thuỷ. Trong công đoạn sản xuất nhựa và phôi cho chai nhựa, các tay máy được sử dụng để lấy sản phẩm đang ở nhiệt độ cao trong khuôn ra ngoài, rút ngắn chu kỳ ép của máy ép nhựa. Trong ngành công nghiệp điện tử, robot sử dụng tay máy SCADA di chuyển các bộ phận vi điện tử từ khay và đặt chúng vào bo mạch in PCBs với độ chính xác tuyệt đối và tốc độ lắp đặt lên tới hàng trăm nghìn bộ phận trên một giờ. Còn trong vận chuyển hàng hoá, mobile robot (AGVs) sử dụng thị giác, máy quét 3D hoặc laser điều khiển quá trình vận chuyển hàng hoá quanh các cơ sở lớn như nhà kho, cảng container, hoặc bệnh viện bằng cách nhận dạng không gian, loại bỏ các lỗi tích lũy trong các quá trình xác định vị trí hiện hành AGV, điều hướng thời gian thực theo nhiều phương thức tránh chướng ngại vật, không thực hiện lặp đi lặp lại…
Theo Hiệp hội robot quốc tế VFR, sở dĩ robot được nhiều nhà máy đưa vào sản xuất để hạ giá thành sản phẩm, tăng thu nhập cho người lao động, nâng cao chất lượng sản phẩm và tự động hoá dây chuyền sản xuất, là do hiệu suất làm việc và độ ổn định lớn. Vì thế, trong những năm gần đây, mật độ robot phục vụ trong các ngành công nghiệp trên thế giới tương đối cao. Năm 2006, số robot công nghiệp phục vụ trong các lĩnh vực chỉ khoảng 950.000 đơn vị. Đến năm 2009, số robot này đã đạt khoảng 1.031.000 đơn vị. Trong đó, robot phục vụ trong các ngành công nghiệp tập trung nhiều nhất là Nhật Bản với số lượng lên tới 339.800 đơn vị. Đứng thứ hai là ở Mỹ với số lượng khoảng 172.800 đơn vị. Đứng thứ ba là Đức với số lượng khoảng 145.800 đơn vị và sau đó là các nước Hàn Quốc, Trung Quốc, Ý, các quốc gia Đông Nam Á và các nước khác. Thế nhưng, robot công nghiệp được ứng dụng trong ngành chế tạo ôtô đã không tăng như trước đây mà mà chúng đang tập trung số lượng ứng dụng vào các ngành điện tử, thực phẩm và đồ uống, và các ngành công nghiệp khác.
Không ngừng cải tiến công nghệ
Khi robot càng tinh vi và linh hoạt, thì chúng càng đòi hỏi các nhà khoa học phải nghiên cứu tỉ mỉ các vấn đề chi phối hoạt động của robot, để tìm ra giải pháp tối ưu cho các dây cruyền sản xuất. Do đó, thay vì tập trung nghiên cứu robot thuộc lĩnh vực cụ thể, giờ đây, các nhà nghiên cứu đã chú trọng hơn tới các phương thức chế tạo và sản xuất robot. Ngoài việc Microsoft triển khai hệ thống “Windows for robot” cho hệ điều hành ROS bằng Robotics Developer Studio đã có từ năm 2007, để tăng khả năng thiết lập chương trình, chuyển tiếp dữ liệu theo thuật toán cáo cấp, nhận dạng hình ảnh, cung cấp giải pháp chuyển hướng tay robot không phụ thuộc phần cứng liên quan, lấy dữ liệu về các thuộc tính như độ dài, cử động tay chân… Các nhà nghiên cứu cũng đang tập trung nghiên cứu những giải pháp tối ưu cho việc ứng dụng sợi nano silic vào robot. Trong đó:
Ông Vernor Vinge-Đại diện cho các nhà khoa học nghiên cứu robot thế giới cho biết: “Công nghệ nano silic không chỉ thúc đẩy tiến trình phát triển của công nghệ robot hiện nay mà còn mang lại cho người sử dụng rất nhiều lợi ích trong lĩnh vực công nghiệp cũng như trong đời sống.”
Nanorobot
Nanorobots: là công nghệ chế tạo máy hoặc robot có khả năng rút ngắn khoảng cách hệ thống chia độ nanometer (10-9 meter). Hiện nay, công nghệ này được sử dụng chủ yếu trong việc sản xuất vòng bi, cảm biến, hệ thống động cơ và robot tham gia cuộc thi Nanobot Robocup. Các nhà nghiên cứu hy vọng, trong tương lai, công nghệ này sẽ giúp họ chế tạo ra những robot kích thước nhỏ có khả năng hoạt động trong phạm vi vi mô như phẫu thuật, làm sạch hệ thống…
Giao diện robot Haptic:Ứng dụng chủ yếu trong việc thiết kế và chế tạo robot hỗ trợ phục hồi chức năng. Loại robot có khả năng giao tiếp với môi trường thực và ảo, mô phỏng các tính chất cơ học “ảo” của đối tượng, và hỗ trợ người sử dụng trải nghiệm cảm giác thông qua giao diện Haptic.
Công nghiệp robot trước tác động xã hội
Tuy nhiên, do những tác động lớn từ phía xã hội nên sau lần tăng trưởng mạnh trong nửa đầu năm 2008, doanh thu robot công nghiệp đã bị trì trệ ở mức khoảng 113.300 đơn vị.
Trong năm 2008, với số lượng robot được bán ra giảm đáng kể ở châu Mỹ, trì trệ ở châu Âu và tăng ở châu Á, tổng doanh thu robot công nghiệp trên toàn thể giới chỉ đạt 6.200.000.000 USD. Tại châu Á, lượng robot được cung cấp cho các ngành công nghiệp khoảng 60.300 đơn vị, tăng 4% so với năm 2007. Châu Mỹ lượng robot được cung cấp khoảng 17.200 đơn vị, giảm 12% so với năm 2007. Còn tại châu Âu lượng robot được cung cấp trì trệ ở mức 35.100 đơn vị. Nguyên nhân chủ yếu dẫn tới tình trạng này là do:
Swarm robot
warm robot: Công nghệ chế tạo robot lấy cảm hứng từ các loài côn trùng như kiến và ong. Công nghệ này giúp các nhà nghiên cứu mô hình hóa hoạt động của robot thực hiện những nhiệm vụ có ích như tìm kiếm vật bị thất lạc, làm sạch hoặc làm gián điệp… Phần lớn những robot này đều tương đối đơn giản, nhưng những hệ thống hoạt động của chúng thường rất phức tạp. Toàn bộ các robot có thể coi là một trong những hệ thống phân phối duy nhất. Vì vậy, ngay khi những robot lớn hoạt động và huỷ nhiệm vụ thì Swarm robot vẫn vận hành giám sát và thực hiện nhiệm vụ robot lớn đã huỷ.
Soft Robots:là công nghệ kết nối robot với các hệ thống và cơ cấu truyền động silicone dẻo. Công nghệ này có khả năng hỗ trợ robot quan sát, cảm nhận và điều khiển hệ thống thực hiện các thao tác kỹ thuật bằng logic mờ và mạng lưới thần kinh.
* Các ngành công nghiệp ô tô không đầu tư tự động hoá để tối ưu hoá quy trình sản xuất như ngành công nghiệp nhựa và cao su, chế tạo máy, công nghiệp kim loại, thực phẩm và ngành công nghiệp điện tử mà tăng cường đầu tư vào các thị trường mới nổi để giành thị phần. Vì vậy, tại hầu hết quốc gia châu Á như Hàn Quốc, Trung Quốc, Ấn Độ và các nước Đông Nam Á đều tăng nguồn cung cấp robot cho các ngành công nghiệp lên đáng kể, đặc biệt là ngành công nghiệp điện-điện tử.
* Cuộc khủng hoảng tài chính cuối năm 2008 đã ngăn xu hướng triển khai tự động hoá trên toàn thế giới. Hầu hết ngành công nghiệp của các quốc gia châu Mỹ và châu Âu đều bị ảnh hưởng mạnh bởi suy thoái kinh tế năm 2007 và sự sụp đổ tài chính mùa thu năm 2008. Trong đó, ngành công nghiệp ôtô, một ngành kinh tế mũi nhọn của Mỹ và Canada chịu thiệt hại nặng nề nhất. Vì thế, số lượng robot được ứng dụng trong các ngành công nghiệp như kim loại, máy móc công nghiệp, công nghiệp dược phẩm và mỹ phẩm, thực phẩm và nước giải khát công nghiệp và ngành công nghiệp điện tử ngành công nghiệp ô tô, cao su và nhựa công nghiệp… đều giảm.
Đến năm 2009, hậu quả suy giảm kinh tế vẫn tiếp tục ảnh hưởng đến ngành công nghiệp robot, khiến doanh thu robot trên thế giới sụt giảm khoảng 40%. Trong đó, châu Á và châu Mỹ giảm 40%, châu Âu giảm 36%. Các chuyên gia kinh tế cho biết, sở dĩ doanh thu robot châu Âu không bị giảm mạnh như ở châu Á và châu Mỹ vì các ngành thực phẩm và nước giải khát, ngành dược phẩm, công nghiệp điện quang và ngành ngành công nghiệp kim loại không bị ảnh hưởng khủng hoảng kinh tế nặng nề như ngành công nghiệp ôtô.
Trong số 10 quốc gia dẫn đầu về lĩnh vực ứng dụng robot là Nhật Bản, Mỹ, Singapore, Hàn Quốc, Đức, Ý, Thụy Điển, Phần Lan, Bỉ và Tây Ban Nha, thì Nhật Bản và Mỹ là hai quốc gia có sự khủng hoảng công nghiệp robot rõ nét nhất. Tại Nhật Bản sản lượng công nghiệp đã sụt giảm tới 40% so với cùng kỳ năm ngoái, hàng trăm nghìn con robot bị “hắt hủi”, thất nghiệp hàng năm nay. Vì thế, những công ty chuyên sản xuất robot lớn như nhà máy Yaskawa Electric nằm trên hòn đảo Kyushu, phía Nam Nhật Bản, từng được biết đến là nhà cung cấp robot công nghiệp hàng đầu của nước này, những con robot chuyên làm công việc lắp ráp tạo ra những chú robot khác, những công nhân với thân hình bằng sắt thép vốn cần mẫn lao động từ xưa, nay đang phải ngồi chơi xơi nước chờ đơn đặt hàng mới. Ông Koji Toshima, chủ tịch Yaskawa, hãng chế tạo robot công nghiệp lớn nhất Nhật Bản than thở: “Suy thoái kinh tế đã đẩy lùi ngành công nghiệp robot nhiều năm. Chúng tôi đang chịu ảnh hưởng nặng nề. Lợi nhuận của công ty đã giảm 2/3, chỉ còn 6,9 tỷ yên (72 triệu USD) tính đến hết năm tài khoá 2008 kết thúc ngày 20/3/2009. Thời gian tới, chúng tôi sẽ phải cắt giảm các khoản đầu tư vào robot, để bảo vệ các nhân công của mình.” Còn tại Mỹ, ngành công nghiệp robot cũng tỏ ra bế tắc không kém. Tổng doanh thu robot năm 2009 giảm tới 47%. Một số hãng sản xuất robot như hãng sản xuất robot Ugobe ở Idaho Mỹ và nhà sản xuất robot Pleo không thể cầm cự được qua cơn khủng hoảng kinh tế đã nộp đơn xin phá sản vào tháng 4/2009. Dù đã bán được 100.000 con robot và thu lãi trên 20.000.000 USD, nhưng họ vẫn mắc nợ hàng triệu USD và không thể tìm được nguồn tài chính mới. Vì thế, vượt qua thời kỳ khủng hoảng này không phải là việc làm đơn giản cho các nhà sản xuất robot.”
Tuy nhiên, theo dự báo của Hiệp hội robot quốc tế VFR, sự sụt giảm doanh thu robot 2009 chính là dấu hiệu khởi đầu khả năng phục hồi của ngành công nghiệp robot. Thị trường robot sẽ “nhộn nhịp” trở lại vào khoảng giữa năm 2010 đến năm 2012 với mức tăng khoảng 15% mỗi năm. Nhưng do sự phục hồi kinh tế trên toàn thế giới diễn biến chậm, nên ngành công nghiệp robot sẽ phải mất nhiều năm mới có thể đạt được mức thành công của năm 2005, 2007 và nửa đầu năm 2008. Vì thế, hoạt động cổ phiếu của thị trường robot truyền thống cũng sẽ bị trì trệ hoặc giảm trong những năm tới.
Reconfigurable Robots
Reconfigurable Robots: là công nghệ chế tạo có khả năng thay đổi hình thức vật lý robot phù hợp với nhiệm vụ cụ thể trong khoảng không gian ngăn cách phức tạp bằng số lượng khối hình nhỏ. Nhờ đó, robot có thể di chuyển tới vị trí kế tiếp dựa trên thuật toán được thiết kế.
Bên cạnh sức ép khủng hoảng kinh tế, ngành công nghiệp robot còn phải đối mặt với nhận thức xã hội. Nhiều quốc gia Tây Âu hiện nay đang lo sợ rằng, tiến trình phát triển công nghệ robot sẽ khiến bộ não robot tồn tại được tới năm 2019 và đột phá trí thông minh nhân tạo vào năm 2050. Khi đó, robot sẽ gây nguy hiểm cho con người. Chính vì lẽ đó, năm nay các nhà khoa học đã đưa vấn đề này ra thảo luận tại hội thảo có tên là Singularitarianism. Với nội dung xuyên suốt hội thảo tập trung chủ yếu vào những hiểm hoạ tiềm năng từ một số loại robot bán tự động có khả năng tìm nguồn năng lượng riêng và độc lập chọn mục tiêu tấn công; một số loại vi rút máy tính có khả năng xâm nhập và thực hiện nhiệm vụ tình báo; những robot tự trị đa năng sử dụng nhiên liệu sinh học và chất hữu cơ nó tìm thấy trong môi trường.., các chuyên gia đã đề nghị xây dựng tính “thân thiện AI” cho các loại robot này bằng cách quy định giới hạn trang bị hệ thống an toàn và tích hợp tính năng nhân tạo cho robot. Mối lo ngại này được lắng xuống khi Hiệp hội Association for the Advacemen of Artificial Intelligence thông qua đề xuất này.
Mặc dù phải đối mặt với khó khăn trước mắt, nhưng theo nhiều chuyên gia, đây là kỷ nguyên mở cửa cho robot và con người cùng tồn tại. Vì vậy, đầu tư vào robot là một việc làm đáng giá trong chiến lược dài hạn. Fuji Heavy Industry cho biết đã tiết kiệm được khoảng 6 triệu Yên trong vòng 3 năm qua do sử dụng robot làm công việc vệ sinh. “Robot có thể làm việc cả ngày lẫn đêm mà không biết phàn nàn. Bạn cũng có thể tiết kiệm điện thắp sáng và lò sưởi do robot không cần đến chúng”, ông Kenta Matsumoto, người phát ngôn của Fuji nói.
Khi quá trình toàn cầu hoá đang tăng tốc, ngành robot ngày càng có vai trò sống còn để đảm bảo cho ngành công nghiệp và các nhiệm vụ sản xuất, robot là yếu tố then chốt, đem tới cho các nhà sản xuất cơ hội tiếp tục sản xuất. Hiện nay và hơn bao giờ hết, nhu cầu duy trì cạnh tranh là động lực quyết định đầu tư cho ngành robot.
Posted on Tháng Một 8, 2015 by Cung cấp thiết bị tự động hóa
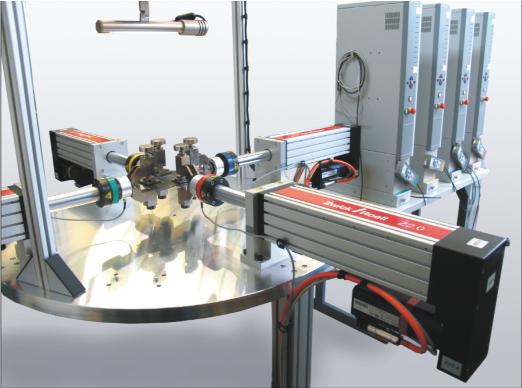
Giới thiệu về công nghệ điều khiển động cơ Servo
Động cơ servo là thành phần quan trọng của hệ thống điều khiển chuyển động.
Để hoạt động được, chúng ta phải nối động cơ servo với các phần cứng, phần mềm hỗ trợ điều khiển chuyển động.
Động cơ servo được kết hợp cơ khí với các thiết bị máy móc khác để cung cấp lực di chuyển các thiết bị này theo yêu cầu của ứng dụng.
Trong bài học này, chúng ta sẽ cùng khám phá công nghệ để vận hành động cơ servo, bộ điều khiển động cơ servo và các phương pháp phản hồi để đạt được hoạt động như mong muốn.
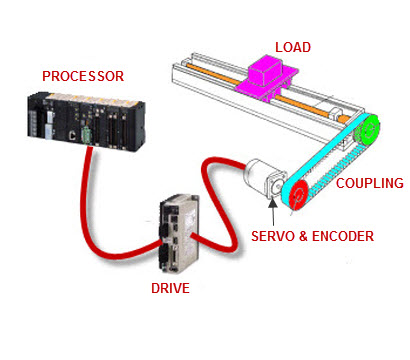
Cấu hình hệ thống động cơ servo
Động cơ servo được sử dụng trong các hệ thống điều khiển chuyển động để cung cấp một lực cơ học cụ thể trong khoảng thời gian nhất định.
Để đạt được điều này, chúng ta phải điều khiển vị trí, vận tốc và mô men của động cơ servo theo yêu cầu ứng dụng.
Để hoạt động chuẩn xác, động cơ servo phải kết hợp với:
Bộ điều khiển – Thông thường là PLC hoặc bộ điều khiển chuyển động chuyên dụng sẽ chạy chương trình điều khiển để thực hiện đúng theo yêu cầu kỹ thuật của ứng dụng.
Bộ điều khiển động cơ – Thiết bị điện tử có chức năng cung cấp đủ năng lượng cho động cơ theo đúng cách, đúng thời điểm.
Bộ mã hóa xung vòng quay – tạo phản hồi cho hoạt động của động cơ.
Cấu trúc động cơ servo
Trong công nghiệp, hầu hết các dạng động cơ servo sử dụng động cơ một chiều không chổi than.
Rotor của động cơ là một nam châm vĩnh cửu có từ trường mạnh. Stator của động cơ được cuốn các cuộn dây riêng biệt, được cấp nguồn theo một trình tự thích hợp để quay rotor.
Nếu thời điểm và dòng điện cấp tới các cuộn dây là chuẩn xác, chuyển động quay của rotor phụ thuộc vào tần số, pha, phân cực và dòng điện chạy trong cuộn dây stator.
Hãy kích chuột vào từng phần của động cơ servo để xem các thành phần bên trong của động cơ.
Bạn có thể thấy:
Đĩa bộ mã hóa xung vòng quay
Nam châm vĩnh cửu
Cuộn dây stator
Chức năng của bộ điều khiển động cơ servo
Cần có nguồn điện cấp tương thích với thiết kế của động cơ servo. Bộ điều khiển động cơ servo thực hiện chức năng này.
Bộ điều khiển cung cấp nguồn cho động cơ servo đúng lượng, đúng thời điểm để điều khiển vị trí, tốc độ và mô men tương ứng với các đầu vào từ bộ điều khiển chuyển động, phản hồi từ bộ mã hóa xung vòng quay và từ bản thân động cơ servo.
Các chức năng khác của bộ điều khiển bao gồm:
Truyền thông với bộ điều khiển chuyển động
Đọc phản hồi từ bộ mã hóa xung vòng quay và điều chỉnh thời gian thực cho mạch vòng điều khiển kín.
Xử lý các tín hiệu vào/ra ví dụ như các thiết bị an toàn, chế độ đầu vào và các tín hiệu đầu ra về trạng thái hoạt động.
Điều khiển năng lượng cho động cơ servo
Bộ điều khiển điện động cơ servo sử dụng một hàng các transistor công suất được gọi là Transistor có cực điều khiển cách ly (IGBT)để kiểm soát năng lượng đưa vào động cơ servo.
IGBT có khả năng chuyển mạch nhanh với dòng lớn nên là lựa chọn lý tưởng cho ứng dụng này.
IGBT được điều khiển bằng các thiết bị điện tử nhằm sản sinh ra các dạng điện áp, dòng điện, tần số, phân cực và pha đặc thù cung cấp cho động cơ servo.
Vì lý do này, mỗi bộ điều khiển thường kết hợp với một dòng động cơ servo cụ thể.
Trong khi tín hiệu đầu vào cho bộ điều khiển động cơ servo là dòng một chiều (DC), đầu ra bộ điều khiển gần như là dạng sóng điện xoay chiều để điều khiển trơn tốc độ, gia tốc và mô men của động cơ servo.
Tín hiệu điều khiển động cơ servo
Dựa vào dữ liệu lưu trong chương trình điều khiển chuyển động, bộ điều khiển nhận tín hiệu để thực hiện một dạng chuyển động nhất định.
Tín hiệu từ bộ điều khiển chuyển động gửi tới bộ điều khiển động cơ servo có thể có nhiều dạng:
Điện áp một chiều dạng tương tự (ví dụ như từ -12VDC đến +12VDC)
Dãy xung
Gói dữ liệu truyền qua mạng
Phản hồi trong hệ thống động cơ servo
Bộ điều khiển và động cơ servo cùng hoạt động để vận hành trong chế độ mạch vòng kín.
Khi sử dụng mạch phản hồi, vị trí thực tế, vận tốc hay mô men của động cơ servo được so sánh với lệnh chuyển động và bất kỳ sai số nào giữa các cặp giá trị trên đều được xác định.
Sau đó, bộ điều khiển động cơ servo sẽ sử dụng các thông tin sai số này để điều chỉnh hoạt động của động cơ theo thời gian thực, sao cho quá trình hoạt động của động cơ đáp ứng được yêu cầu của ứng dụng.
Chu trình phản hồi – xác định sai số – triệt tiêu sai số được gọi làmạch vòng điều khiển kín.
Mạch vòng điều khiển
Mạch vòng điều khiển được xử lý bởi bộ điều khiển động cơ servo, bộ điều khiển chuyển động hoặc cả hai tùy thuộc vào yêu cầu điều khiển.
Để đạt được chuyển động như mong muốn cho ứng dụng của mình, chúng ta có thể tách riêng các mạch vòng điều khiển cho vị trí, vận tốc và mô men.
Không phải tất cả các ứng dụng điều khiển đều bao gồm cả ba dạng mạch vòng điều khiển vừa nêu. Nhiều ứng dụng chỉ gồm có mạch vòng dòng điện và mạch vòng tốc độ dùng cho điều khiển tốc độ. Nhiều ứng dụng lại cần có cả ba mạch vòng điều khiển để điều khiển vị trí.
Điều khiển vị trí (position Loop)
Vị trí được hiểu là vị trí góc tuyệt đối của trục động cơ servo hoặc trong vài trường hợp, là vị trí của thiết bị truyền động bởi động cơ servo.
Khi động cơ servo thay đổi vị trí, bộ mã hóa xung vòng quay của động cơ servo sẽ gửi phản hồi vị trí thực tế của trục động cơ tới bộ điều khiển động cơ servo hoặc có thể gửi tín hiệu trực tiếp tới bộ điều khiển chuyển động.
Mạch vòng vị trí sẽ tiến hành so sánh vị trí đặt và vị trí thực tế; từ sai số nhận được và các thông số căn chỉnh của mạch vòng, bộ điều khiển tự động điều chỉnh vị trí trục quay động cơ theo thời gian thực để triệt tiêu sai lệch vị trí.
Theo cách này, động cơ servo sẽ thực hiện chính xác theo thông số đã đặt trước ngay cả khi điều kiện vận hành thay đổi. Ví dụ như, nếu thiết bị truyền động bởi động cơ servo trở nên khó di chuyển, bộ điều khiển động cơ servo sẽ điều khiển tăng mô men sinh ra và/hoặc điều khiển động cơ vận hành trong khoảng thời gian lâu hơn để đạt được vị trí mong muốn bất chấp ma sát của cơ cấu truyền động.
Điều khiển tốc độ (Velocity Loop)
Tốc độ ở đây được hiểu là vận tốc và chiều quay của động cơ servo.
Khi động cơ servo tăng tốc hoặc giảm tốc, bộ mã hóa xung vòng quay sẽ gửi vận tốc và chiều quay thực tế tới bộ điều khiển động cơ servo hoặc gửi trực tiếp tới bộ điều khiển chuyển động.
Mạch vòng tốc độ sẽ so sánh tốc độ đặt với tốc độ hiện tại; dựa vào sai số tốc độ và các thông số căn chỉnh của mạch vòng, bộ điều khiển động cơ sẽ tự động điều chỉnh vận tốc động cơ theo thời gian thực để đạt được các yêu cầu của ứng dụng.
Theo cách này, động cơ servo sẽ thực hiện đúng theo các thông số đã cài đặt ngay cả khi điều kiện vận hành thay đổi. Ví dụ như, nếu động cơ servo truyền động cho một cơ cấu có trọng lượng lớn, động cơ sẽ rất khó để giảm tốc. Trong trường hợp này, động cơ có thể tăng mô men nghịch để dừng tải trong khoảng thời gian và khoảng cách theo yêu cầu của ứng dụng.
Điều khiển Mô men (Current Loop)
Mô men của động cơ Servo là lực tạo ra từ chuyển động quay của rotor động cơ.
Mô men tạo ra tỷ lệ thuận với dòng điện hiệu dụng chạy trong cuộn dây stator của động cơ. Dòng hiệu dụng càng cao, mô men sinh ra càng lớn.
Bộ điều khiển động cơ servo đo trị số dòng hiệu dụng chạy trong cuộn dây stator và dùng phản hồi giá trị này để tự động điều chỉnh dòng điện trong động cơ theo thời gian thực nhằm đáp ứng được yêu cầu mô men của ứng dụng.
Mạch vòng dòng điện đôi khi được hiểu là mạch vòng mô men.
Trong ví dụ sau, bộ điều khiển gửi đi 32 xung để điều khiển vị trí động cơ.
Bộ mã hóa xung vòng quay gửi tín hiệu phản hồi vị trí của động cơ. Sai số nhận được sẽ được sử dụng để điều chỉnh động cơ đến vị trí đúng.
Do quán tính nên động cơ chuyển động vượt quá vị trí chuẩn một chút, sai số vị trí này sẽ được dùng để điều chỉnh động cơ về vị trí đúng.
Bộ phản hồi mã hóa xung vòng quay
Bộ mã hóa xung vòng quay (encoder) là thiết bị phần cứng thiết yếu của hệ thống động cơ servo có tác dụng phản hồi tốc độ và vị trí.
Thông thường, bộ mã hóa xung vòng quay nằm trong hoặc được gắn với động cơ servo. Trong một vài ứng dụng, bộ mã hóa xung vòng quay là thiết bị được gá lắp riêng biệt với động cơ. Cách gá lắp này giúp cho bộ mã hóa xung vòng quay ghi nhận được các thông số khác ảnh hưởng đến hoạt động của động cơ servo.
Có hai dạng bộ mã hóa xung vòng quay chính:
Bộ mã hóa xung vòng quay tỷ lệ (incremental)
Bộ mã hóa xung vòng quay tuyệt đối (absolute)
Cấu trúc vật lý của bộ mã hóa xung vòng quay quyết định dạng tín hiệu phản hồi. Chúng ta hãy cùng xem chúng khác nhau như thế nào!
1. Bộ mã hóa xung vòng quay tỷ lệ
Bộ mã hóa xung vòng quay tỷ lệ áp dụng nguyên lý quang học sử dụng một đĩa thủy tinh trong suốt được in các vạch đối xứng tỏa tròn theo khoảng cách đều. Đĩa này được gắn cố định với trục động cơ và quay cùng rotor của động cơ.
Các vạch trên đĩa được phát hiện bởi một cảm biến quang điện. Đầu ra của cảm biến thay đổi mỗi khi có sự thay đổi từ sáng sang tối hoặc từ tối sang sáng. Tốc độ thay đổi này tỷ lệ thuận với vận tốc động cơ. Đầu ra của bộ mã hóa xung vòng quay là một dải xung tỷ lệ với vận tốc động cơ. Đầu ra này đôi lúc còn được gọi là tín hiệu Pha A.
Như vậy, với bộ mã hóa này chúng ta không thể biết được chiều quay mà chỉ biết được tốc độ của động cơ.
Để biết được chiều quay, bộ mã hóa xung vòng quay tỷ lệ cần lắp thêm một cảm biến quang thứ hai, cách cảm biến thứ nhất một khoảng cách nhất định.
Khi thay đổi chiều quay thì xung cũng thay đổi
Vị trí của cảm biến thứ hai được lắp ở trị trí sao cho sự thay đổi sáng tối làm cho đầu ra của cảm biến thứ hai lệch pha 90 độ so với cảm biến thứ nhất. Quan hệ giữa các xung này được gọi là chậm pha ¼ chu kỳ.
Bằng cách so sánh hai dãy xung lệch pha này, ngoài xác định được vận tốc quay còn có thể xác định được chiều quay!
Đầu ra từ cảm biến thứ 2 còn được gọi là tín hiệu Pha B.
Bên cạnh tín hiệu pha A và pha B, bộ mã hóa xung vòng quay có thể có đầu ra thứ ba được gọi là Pha Z.
Pha Z chỉ xuất đi một xung ứng với mỗi vòng quay. Tín hiệu này có tác dụng xác định vị trí gốc ban đầu hoặc vị trí tham chiếu.
Bộ mã hóa xung vòng quay tỷ lệ sử dụng xung tham chiếu này là điểm bắt đầu để từ đó xác định vị trí tuyệt đối bằng cách đếm số xung bắt đầu từ một vị trí đã biết.
2. Bộ mã hóa xung vòng quay tuyệt đối
Bộ mã hóa xung vòng quay tuyệt đối cũng sử dụng một đĩa trong suốt; nhưng thay vì dùng các vạch in, đĩa này có các vùng trong suốt và vùng mờ sắp xếp theo mã nhị phân.
Mỗi bit mã hóa là một vùng riêng biệt trên đĩa và các cảm biến quang sẽ đồng thời đọc tất cả các vùng này.
Dữ liệu đọc từ đĩa là duy nhất ứng với mỗi vị trí góc của trục động cơ. Dữ liệu này có thể được gửi đi từ bộ mã hóa theo phương thức song song hoặc được chuyển đổi sang kiểu dữ liệu nối tiếp.
Số bit trong mã dữ liệu quy định độ phân giải góc của bộ mã hóa xung vòng quay. Theo lý thuyết, một bộ mã hóa xung vòng quay có độ phân giải 12 bit sẽ sinh ra 4096 mã đơn nhất khi quay một vòng 360 độ; hay nói cách khác khi trục động cơ quay được 0.088 độ sẽ xuất ra một mã đơn nhất. Có nhiều yếu tố ảnh hưởng tới việc tăng thêm số góc thực tế nhưng bộ mã hóa 20 bit cũng không phải là hiếm gặp!
Một phương pháp khác để xác định vị trí tuyệt đối là kết hợp một dạng đặc biệt của bộ mã hóa xung vòng quay tỷ lệ với một bộ nhớ phần cứng cùng với một phần mềm riêng thay vì sử dụng chiếc đĩa đắt đỏ của bộ mã hóa tuyệt đối.
Thiết bị sử dụng các xung lũy tiến từ bộ mã hóa để tạo một vị trí ảo tuyệt đối trong bộ nhớ phần cứng. Nhờ có pin, bộ nhớ được duy trì ngay cả khi ngắt nguồn của hệ thống.
Cả hai dạng bộ mã hóa xung vòng quay tuyệt đối đều có thể gửi phản hồi vị trí cần thiết đến bộ điều khiển động cơ servo.
Năng lượng tái tạo
Hãy kích chuột vào nút Play để quan sát năng lượng tái sinh được tô màu đỏ.
Các bạn có thể sẽ ngạc nhiên khi biết rằng động cơ servo có thểphát điện!
Nếu quay một động cơ servo bằng một ngoại lực (ví dụ như quay bằng tay), một dòng điện sẽ được cảm ứng trong stator của động cơ!
Khi dùng một động cơ servo để nâng thiết bị công nghiệp theo phương thẳng đứng, động cơ phải thắng được trọng lực và phải sản sinh nhiều mô men hơn. Mặc dù vậy, khi thiết bị được hạ xuống, trọng lực này lại làm quay trục động cơ!
Đối với các chuyển động ngang, khi bộ điều khiển động cơ muốn giảm nhanh tốc độ một tải trọng nặng (phanh), quán tính của tải trọng sẽ làm trục động cơ tiếp tục quay và năng lượng điện thừa sinh ra cần phải được tiêu tán.
Năng lượng này được gọi là năng lượng tái sinh, và bộ điều khiển động cơ servo được thiết kế để tiêu tán một lượng năng lượng tái sinh nhất định.
Nếu năng lượng tái sinh này vượt quá khả năng tiêu tán của bộ điều khiển, chúng ta cần lắp thêm điện trở hãm để tiêu tán năng lượng này thành dạng nhiệt năng.
Posted on Tháng Mười Một 21, 2014 by Cung cấp thiết bị tự động hóa
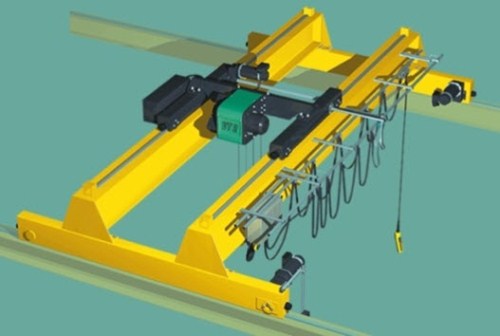
Biến tần Yaskawa A1000 cung cấp cho chúng ta một giải pháp đơn giản và hiệu quả cho các yêu cầu khắt khe trong ứng dụng cầu trục và nâng hạ. Nó đảm bảo cho việc điều khiển motor nâng hạ vận hành đủ moment trong mọi điều kiện, bên cạnh đó việc tích hợp các chức năng điều khiển quan trọng khác như điều khiển thắng, phát hiện quá tải … giúp cho việc điều khiển và vận hành cầu trục chính xác và an toàn.
200V 3-Phase 0.4 – 110KW
400V 3-Phase 0.4 – 300KW
Các ngõ vào ra
8 ngõ vào số:
*Có thể đấu kiểu Sink hoặc Source
*Có thể sử dụng nguồn 24VDC ngoài
Moment khởi động 200%, khả năng quá tải 150% trong vòng 60s. Đảm bảo khả năng vận hành dưới các điều kiện tải nặng.
Cung cấp đủ moment tại 0 Hz cho quá trình điều khiển thắng, giúp khởi động mượt mà, tăng tuổi thọ của thắng cơ bên ngoài.
Vận hành mượt mà êm ái, giúp giảm sốc và sự mài mòn cho các cơ cấu cơ khí và hàng hóa.
Tích hợp chức năng điều khiển thắng an toàn:
Cài đặt điều kiện đóng thắng và mở thắng riêng biệt
Kiểm tra kết nối motor truớc khi vận hành.
Giám sát quá trình điều khiển thắng.
Tự động ngắt khi quá tải giúp đảm bảo an toàn trong các truờng hợp tải nặng.
Chức năng Ultra Lift Function giúp tăng tốc độ vận hành, rút ngắn thời gian trong điều kiện không tải, làm tăng khả năng sản xuất.
Tích hợp các chức năng nhận cảm biến trọng lượng và cảm biến hành trình ngăng chặn sự vận hành trong các truờng hợp mất an toàn.
Tự động chia tải giữa các biến tần trong truờng hợp nhiều biến tần cùng vận hành.
Tích hợp hàm an toàn STO (Safe Torque Off ).
1 Ngõ vào nhận xung đến 32 Khz: dễ dàng đồng bộ với các thiết bị khác
3 ngõ vào Analog: có thể chọn kiểu điện áp, dòng điện, PTC
Relay báo lỗi ( NO & NC )
Hàm chức năng an toàn: 2 kênh STO ( safe torque off ) ( EN ISO 13849-1 )
3 relay ngõ ra dạng transistor
1 Ngõ ra phát xung 32 Khz
2 Ngõ ra Analog: có thể chọn kiểu điện áp hoặc dòng điện.
Thiết bị giám sát bên ngoài (EDM )
Phụ kiện
Yaskawa có nhiều phụ kiện và công cụ cho biến tần A1000 trong ứng dụng cầu trục:
Phần mềm
Điện trở xả
Nguồn
Giao diện người dùng
Drive Wizard Plus:cài đặt, giám sát, quản lý qua PC
Mạnh mẽ không chỉ là dư công suất nhiều mà là tính năng và giải pháp mã hãng mang lại cho khách hàng, hay nói khác đi đó là cách để tiết kiệm chi phí hiệu quả và bền vững.
Tải siêu nặng, giải pháp tối ưu cho nâng hạ cầu trục hãm động năng lớn, lắp trở xả tiện dụng, dừng quán tính cao, vô cùng chính xác và êm ái vượt mọi thách thức quán tính, điều khiển vector vòng dòng hở.
1. Chính sách phân phối và giá cả tốt nhất. 2.An toàn hiệu quả và dễ dàng cài đặt biến tần 3.Heavy Duty/Dutysiêu nặng,0.4 ~560kW Biến tần YaskawaH1000 thông minh điều khiển Vector vòng dòng hở và vòng kín với card PG Tự động điều chỉnhchođiều khiển vector vòng hở
Thông báo tín hiệu quá tải trước khi dừng hoạt động
Hai giai đoạntăng tốcvà giảm tốc
Hiệu suất cao Momen tốc độ thấp cực lớn và chất lượng điều khiển tốc độ nâng hạ tuyệt hảo
Điều chỉnh điện áptự động(AVR) chức năng
Truyền thông mạng MemobusvớiRS485vàRS232 Mô-men bằng hằng số ở chế độ Volt/Hertz Tất cả các dải công suất đều có sẵn. ứng dụng Thang máy,quá trình chế biến giấy,máycán,thiết bịnâng,di chuyểneuipmentthang máy,cẩu vàtruyền tải, máycông cụkim loại, xử lýthực phẩm,tảiquán tínhlớnmahinevàcác ứng dụng khác. Luôn sẵn sàng để phục vụ quý khách hàng.
Lần đầu tiên tại Việt Nam, chúng tôi đã ứng dụng thành công biến tần Yaskawa H1000 điều khiển cho motor có roto hình nón ( Conical rotor motor), đây là loại motor có cấu tạo đặc biệt an toàn cho ứng dụng nâng hạ, với cấu tạo phần phanh hãm gắn liền trên roto của motor , cho kết cấu vững chắc và ổn định, ít phải bảo trì. Việc ứng dụng thành công này cho thấy Yaskawa H1000 xứng đáng với đẳng cấp số 1 trong lĩnh vực nâng hạ và điều khiển cầu trục.
Posted on Tháng Tám 30, 2014 by Cung cấp thiết bị tự động hóa
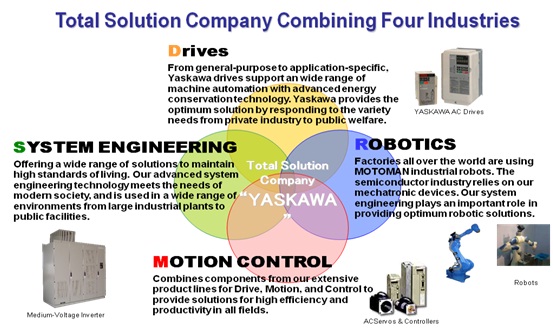
Yaskawa Electric là tập đoàn hàng đầu thế giới trong sản xuất và cung cấp các sản phẩm trong lĩnh vực truyền động điện, Robot công nghiệp trên thế giới với trụ sở chính tại Kitakyushu, Nhật Bản. Trải qua gần 100 thành lập và phát triển, với tiền thân là một công ty chuyên sản xuất động cơ và các thiết bị truyền động điện, Yaskawa Electric đã không ngừng nghiên cứu, mở rộng sản xuất và hiện tại đã trở thành một trong những nhà sản xuất thiết bị công nghiệp tự động hóa hàng đầu thế giới. Yaskawa cam kết đóng góp vào sự phát triển hơn nữa của xã hội bằng việc tập trung sản xuất và kinh doanh những sản phẩm thế mạnh của Yaskawa gồm “Biến tần”, “Động cơ Servo”, “Bộ điều khiển” và “Robot công nghiệp”, đồng thời cung cấp cho khách hàng các giải pháp mới sử dụng thế mạnh công nghệ của Yaskawa.
♦ Biến tần trung thế Yaskawa MV1000: là dòng biến tần trung thế siêu tiết kiệm năng lượng, với các dải điện áp khác nhau: 3.3kW, 6.6kW, 11kW. Với các ưu điểm sóng hài cực thấp gần như bằng 0, không tăng điện áp, mô men xoắn thấp, vận hành hiệu suất cao, MV1000 được ứng dụng nhiều trong các máy móc công nghiệp nặng, bơm cấp thoát nước, băng tải… giúp tiết kiệm năng lượng hiệu quả, truyền động tin cậy, đáp ứng các yêu cầu vận hành tối ưu.
♦ Biến tần hạ thế Yaskawa:cung cấp nhiều loại biến tần đáp ứng mọi nhu cầu trong sản xuất: biến tần đa năng A1000 cho cầu trục, băng chuyền, máy công cụ, HVAC với dải công suất lên tới 630kW; biến tần V1000 công suất nhỏ cho bơm, quạt, băng chuyền, cửa tự động…; biến tần J1000 nổi bật với kết cấu nhỏ gọn, đa năng, cài đặt dễ dàng; biến tần Yaskawa E1000 tiết kiệm năng lượng, độ ồn thấp, chuyên dùng cho ứng dụng bơm, quạt, HVAC; biến tần U1000, D1000 cho các ứng dụng tiết kiệm năng lượng cao cấp sử dụng công nghệ AC Matrix nổi tiếng của Yaskawa.
♦ Các giải pháp kĩ thuật tổng thể (system engineering): cung cấp các giải pháp kĩ thuật cho các hệ thống nhà máy lớn với đội ngũ kĩ sư kinh nghiệm lâu năm, trình độ cao sẽ cung cấp các giải pháp đảm bảo các hệ thống trong nhà máy được vận hành, giám sát, điều khiển bằng hệ thống đồng bộ như nhà máy thép, nhà máy giấy, nhà máy nước giải khát, chế biến thực phẩm…♦ PLC Vipa: sản phẩm được phát triển bởi các kĩ sư kinh nghiệm lâu năm tại Đức từ năm 1985 và chính thức trở thành thành viên của Yaskawa từ năm 2012. Với các dòng sản phẩm SLIO, 100V, 200V, 300S, 500S tích hợp các tính năng vượt trội, tương thích với các loại PLC của Siemens, có thể lập trình dễ dàng bằng WinPLC7 hoặc Step7, các bộ HMI chất lượng cao, PLC Vipa sẽ là dòng sản phẩm có tính cạnh tranh cao với các dòng PLC trên thị trường.
Mặc dù gia nhập thị trường tự động hóa Việt Nam muộn hơn so với các nhà sản xuất, cung cấp các thiết bị tự động hóa như ABB, Siemens, Omron, Hitachi, … nhưng các sản phẩm như biến tần, động cơ servo, Robot Motoman của Yaskawa đã nhanh chóng khẳng định chất lượng, thương hiệu và được khách hàng đánh giá rất cao. Nhận thức được Việt Nam là một thị trường tiềm năng, tập đoàn Yaskawa Electric đã xúc tiến nhiều hoạt động mang tính bước ngoặt như mở đại diện bán hàng của hãng tại Việt Nam từ đầu những năm 2008 và tham gia nhiều hội trợ triển lãm tại Việt Nam để giới thiệu biến tần, động cơ và Robot với khách hàng tại Việt Nam. Nối tiếp các sự kiện đó, năm 2011 Yaskawa Electric đã chính thức thiết lập Văn phòng Đại diện Yaskawa Electric tại Việt Nam làm cầu nối cho hoạt động kinh doanh, phát triển và đánh giá thị trường đối với các sản phẩm Yaskawa. Với định hướng và chiến lược đúng đắn, doanh số và uy tín của Yaskawa Electric tại Việt Nam không ngừng tăng trưởng ấn tượng qua từng năm. Từ tháng 12 năm 2013 tập đoàn Yaskawa Electric chính thức thành lập chi nhánh tại Việt Nam với mô hình là Công ty TNHH Yaskawa Electric Việt Nam với chiến lược phát triển bền vững, nhằm mang tới cho khách hàng những sản phẩm và dịch vụ tốt hơn.
Posted on Tháng Tám 27, 2014 by Cung cấp thiết bị tự động hóa
Tổng quan
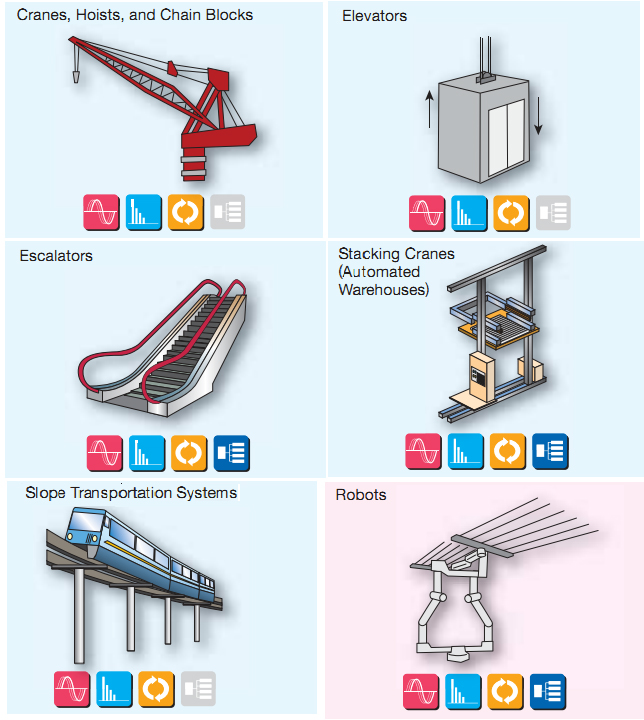
Các dòng biến tần Yaskawa có thể được ứng dụng cho các loại cầu trục và các máy nâng hạ (cẩu trục) trong chuyển động lên xuống hoặc di chuyển ngang. Có 2 loại máy nâng hạ cơ bản. Loại đầu tiên là máy nâng hạ sử dụng phanh hãm (load-brake hoist). Loại này có kết hợp với phanh (một thiết bị cơ khí tự khóa để cản trở chuyển động đi xuống của tải). Vì vậy, để tải có thể chuyển động xuống, động cơ cần phát ra momen hướng theo chiều đi xuống của tải. Trong trường hợp này, tải sẽ không thể đi xuống nhanh dần bởi nguyên trọng lực của bản thân nó.
Một loại khác của máy nâng hạ được gọi là máy nâng hạ không có phanh hãm (non-load brake hoist). Loại máy nâng hạ này cần momen động cơ hướng lên để giữ cho tải không đi xuống do trọng lực. Hơn thế nữa, máy nâng hạ không có phanh hãm sẽ sinh ra năng lượng ngược trở lại biến tần khi tải đi xuống. Chính vì vậy, để loại bỏ năng lượng này, ta sử dụng một thiết bị điện có tên gọi là phanh động lực – dynamic brake (DB) – trên thực tế đây có thể là một điện trở được tích hợp vào trong biến tần hoặc đi kèm bên ngoài có tác dụng loại bỏ nguồn năng lượng từ tải trả về biến tần trong quá trình hoạt động. Thuật ngữ phanh động lực (DB) được nhắc đến ở đây, ta sẽ tạm gọi là điện trở xả.
Trong trường hợp chuyển động ngang, các ứng dụng cũng giống như các máy nâng hạ không có phanh hãm, trong trường hợp này chúng không cần phải kết hợp với phanh hãm cơ khí. Hơn thế nữa, khi chuyển động ngang, mặc dù trọng lực không đóng vai trò quan trọng như chuyển động nâng hạ, nhưng trên thực tế chuyển động theo trục này vẫn sẽ sinh ra năng lượng tái sinh ở một mức độ nào đó trong quá trình thiết bị giảm tốc hoặc dừng. Chính vì vậy điện trở xả cũng được sử dụng như một giải pháp để loại bỏ nguồn năng lượng này và bảo đảm an toàn cho biến tần trong quá trình hoạt động.
Tiêu chuẩn lựa chọn
Tổng quan của một hệ thống cầu trục và của các máy nâng hạ phải đáp ứng được các tiêu chuẩn của CMAA [3] và HMI về mức độ an toàn cũng như các tiêu chuẩn trong quá trình hoạt động. Điều này có nghĩa rằng các phần tử cơ khí và điện phải phù hợp về kích thước để có thể nâng, hạ và dừng tải một cách an toàn. Đồng thời, công suất của biến tần và động cơ cần đủ lớn để sinh ra momen đầu trục tương ứng để giải quyết những yêu cầu trên. Điều này sẽ phụ thuộc vào thiết kế cơ khí (hộp số, …) và việc thiết kế hệ thống theo chuẩn CMAA/HMI nào.
Nhìn chung, các tiêu chuẩn công nghiệp yêu cầu toàn bộ hệ thống nâng hạ cơ – điện phải cung cấp các chức năng nhằm đảm bảo tốc độ, hành trình không được vượt quá mức cho phép và ít nhất 2 phương tiện phanh hãm. Sử dụng điện trở xả có thể là một trong nhiều giải pháp để phanh hãm tải và có thể được áp dụng để loại bỏ năng lượng tái sinh được sinh ra khi tải đi xuống.
Với các chuyển động theo trục ngang, kích thước phụ thuộc và công suất, thiết kế của hệ thống cũng như lớp CMAA mà hệ thống áp dụng. Trong chuyển động theo trục ngang, việc bảo vệ không cho vượt quá mức hành trình cho phép cũng phải được sử dụng. Như đã đề cập ở trên, điện trở xả ở đây được sử dụng để loại bỏ năng lượng tái sinh được sinh ra trong quá trình giảm tốc và dừng.
Các biến tần Yaskawa trên thực tế phù hợp cho tất cả các loại cầu trục và các thiết bị nâng hạ (kiểu có phanh hãm tải, không có phanh hãm tải, hoặc chuyển động theo trục ngang). Hơn nữa, các loại biến tần này đưa ra những đường đặc tính momen tối ưu cho các ứng dụng cầu trục và thiết bị nâng hạ như momen lớn khi khởi động và khi ở vùng tốc độ thấp. Với một giá trị công suất yêu cầu, ta có thể lựa chọn được biến tần Yaskawa phù hợp và các phụ kiện đi kèm cho từng ứng dụng cụ thể. Đối với ứng dụng cầu trục và các máy nâng hạ, biến tần Yaskawa có thể sử dụng là dòng sản phẩm A1000, G7 hoặc H1000. Dòng H1000 là dòng sản xuất cho thị trường Trung Quốc. Các mẫu biến tần cụ thể để lựa chọn còn phụ thuộc vào những sự đánh giá, ví dụ như đánh giá về khía cạnh chuyển động (chuyển động lên xuống hoặc sang ngang), loại dịch vụ, …
Các máy nâng hạ có phanh hãm (load-brake hoist)
Nhìn chung, với các thiết bị nâng hạ sử dụng phanh hãm tải, ta có thể sử dụng biến tần Yaskawa dòng sản phẩm A1000 hoặc G7 với cấu hình mạch vòng hở. Vì trong trường hợp này, ta không cần sử dụng các thiết bị mã hóa (encoder). Biến tần sẽ cung cấp đủ momen mà không cần đến sự trợ giúp của một encoder nào cả. Điện trở xả cũng không cần sử dụng trong trường hợp này, bởi vì bản thân của phanh hãm tải đã tự giới hạn chuyển động đi xuống và hấp thụ thế năng được chuyển từ tải trả về.
Các máy nâng hạ không sử dụng phanh hãm (non-load brake hoist)
Biến tần Yaskawa A1000
Các thiết bị nâng hạ (cẩu trục) có thể sử dụng cả các biến tần mạch vòng hở và mạch vòng kín. Việc sử dụng loại biến tần nào phụ thuộc vào kết cấu cơ khí của thiết bị nâng hạ và loại thiết bị sử dụng. Thuật ngữ “mạch vòng kín” sẽ giúp ta hình dung rằng động cơ (hoặc hộp số) kết hợp với encoder để cung cấp tín hiệu phản hồi tốc độ đến biến tần và tạo thành vòng kín. Vị trí đặt encoder là ở trục của động cơ. Thông qua việc sử dụng encoder, biến tần Yaskawa sẽ cung cấp 1 giải pháp tốt nhất và cho các đặc tính hoạt động tốt nhất cho động cơ trong các ứng dụng máy nâng hạ không sử dụng phanh hãm. Trong một vài trường hợp, bộ giải mã encoder có thể được cài đặt sau khi đi vào hoạt động. Nhưng điều này sẽ nảy sinh ra các vấn đề về trượt hoặc giật lùi làm cho đặc tính điều chỉnh tốc độ giảm đi.
CMAA/HMI quy định ít nhất 2 sự trợ giúp về phương diện phanh hãm cũng như bảo vệ quá tốc độ với các thiết bị nâng hạ loại này. Trong trường hợp máy nâng hạ không có phanh hãm tải, tín hiệu phản hồi tốc độ trên đầu trục động cơ thông qua bộ giải mã (encoder) sẽ cung cấp tín hiệu để phục vụ cho việc bảo vệ quá tốc độ. Biến tần Yaskawa mạch vòng kín được sử dụng rất phổ biến cho các thiết bị nâng hạ không có phanh hãm tải kiểu này. Trong các dòng sản phẩm biến tần Yaskawa, A1000 có thể được sử dụng cho các ứng dụng mạch vòng kín bởi vì nó có khe cắm board nằm ở bên trong, khe cắm này có thể sử dụng để cắm board encoder phản hồi tín hiệu. Tuy nhiên, phụ thuộc vào kết cấu cơ khí của thiết bị nâng hạ, trong một số trường hợp các biến tần mạch vòng hở (không có phản hồi thông qua encoder) vẫn có thể được sử dụng. Trong trường hợp này, bảo vệ quá tốc độ cần được trợ giúp thông qua các liên kết về cơ khí.
Điện trở xả hoặc các phần tử xả là một phương pháp truyền thống trong việc giải quyết với năng lượng tái sinh và được sử dụng cho hầu hết các thiết bị nâng hạ không sử dụng phanh hãm. Trong khi phương pháp hãm đầu tiên luôn là một vài kiểu phanh hãm cơ điện thì đây được xem như là phương pháp hãm tải thứ hai cho các loại máy nâng hạ này. Ta có thể sử dụng biểu đồ chọn lựa đã được phát triển bởi Yaskawa để chọn ra các giải pháp phanh hãm phù hợp, các yếu tố lựa chọn phụ thuộc vào công suất (hp), trục (nâng, hạ hoặc di chuyển ngang) và loại tiêu chuẩn CMAA/HMI. Cuối cùng, 1 board giao diện treo (115VIF-DIN) được yêu cầu sử dụng để hoàn thành gói biến tần cho các ứng dụng thiết bị nâng hạ (cẩu trục) loại này.
Trục ngang (xe con)
Toàn bộ các ứng dụng cho chuyển động ngang thuộc loại mạch vòng hở, nên ta không cần sử dụng các board phản hồi và các encoder mã hóa. E1000 có thể được sử dụng với các ứng dụng công suất dưới 10hp và biến tần loại A1000 được sử dụng cho công suất từ 15hp trở lên. Điện trở xả hoặc các phần tử xả có thể được sử dụng.
Ưu điểm của việc sử dụng biến tần Yaskawa
Các biến tần Yaskawa có đặc tính hoạt động tốt, mạnh mẽ và đáng tin cậy. Chúng bao gồm rất nhiều các chức năng phát hiện và chẩn đoán lỗi, sự cố giúp cho việc hoạt động được an toàn. Chúng được sử dụng cho các ứng dụng cần trục, cẩu trục thông qua một board giao diện được phát triển độc quyền bởi Yaskawa. Đây là 1 board giá thành không cao nhưng có các đặc điểm rất tốt như các đầu vào được cách ly quang, chuyển các tín hiệu phụ trợ và xử lý các tín hiệu logic cần thiết cũng như có các chức năng an toàn cho việc điều khiển cầu trục và các thiết bị nâng hạ (cẩu trục).
Mạch hãm động lực sử dụng điện trở xả được tích hợp trong tất cả các dòng sản phẩm lên đến 30hp hoặc các bộ phận hãm động lực được nối bên ngoài với giá thành phù hợp cho các công suất lớn hơn.
Đặc điểm nổi bật nữa của bien tan A1000 và G7 là bộ điều khiển logic được xây dựng bên trong các biến tần được gọi là EZ Sequence (EzSQ). Điều này giúp cho ta có thể lập trình hoạt động cho các biến tần. Với việc đổ các chương trình EzSQ (đã lập trình cụ thể cho ứng dụng cầu trục và thiết bị nâng hạ) xuống biến tần, A1000 và G7có thể phân phối momen tối ưu và bảo đảm động cơ cũng như hệ thống làm việc với độ an toàn cao nhất.
Các bien tan Yaskawa có nét nổi bật nữa đó là phần mềm cấu hình trên PC rất mạnh, đó là phần mềm ProDriveNext – một hỗ trợ công nghệ tuyệt vời – giúp cho việc giao tiếp giữa người sử dụng và biến tần trở nên thân thiện hơn bao giờ hết. Và cuối cùng biến Yaskawa là một hãng biến tần tốt nhất mà bạn có thể lựa chọn cho các ứng dụng cầu trục và các thiết bị nâng hạ của bạn.
Posted on Tháng Ba 25, 2014 by Cung cấp thiết bị tự động hóa
Biến tần hãm tái sinh năng lượng R1000 Yaskawa nhật bản.
Dải công suất
Điện áp 3 pha ~ 200V, từ 3.5kW đến 105kW
Điện áp 3 pha ~ 400V,3.5kW đến 300kW
Biến tấn R1000 Yaskawa là biến tần tái tạo năng lượng với cả hai chức năng phanh và hãm tái sinh.
Biến tần R1000 Yaskawa cho thấy hiệu suất tiết kiệm năng lượng tuyệt vời khi sử dụng biến tần.
Biến tần YaskawaR1000 được ứng dụng mạnh mẽ với các ứng dụng nâng hạ tải trọng lớn như cầu trục, thang máy, vận thăng, cẩu tháp. Bời vì Yaskawa R1000 không cần bộ hãm và điện trở xả, đòi hỏi ít không gian lắp đặt, tính năng phanh mạnh mẽ.
Tính năng
Tiết kiệm năng lượng đơn vị giúp trong việc giảm chi phí hoạt động
Tăng momen phanh cung cấp thêm lực phanh với hoạt động tái sinh liên tục.
Posted on Tháng Ba 25, 2014 by Cung cấp thiết bị tự động hóa
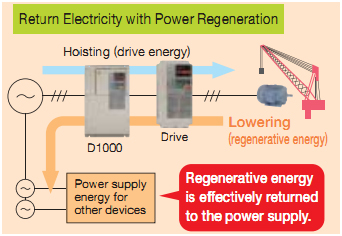
Như ta biết, có thể tiết kiệm năng lượng bằng cách sử dụng biến tần, hoặc sử dụng các động cơ có hiệu suất cao hoặc ta có thể sử dụng lại năng lượng tái sinh trong hệ thống. Dòng sản phẩm mới của Yaskawa– D1000 giú ta tiết kiệm năng luợng bằng cách sử dụng lại năng luợng hãm tái sinh 1 cách triệt để. Biến tần yaskawa D1000 thích hợp cho các biến tần servo đơn lẻ cũng như là các hệ thống gồm nhiều biến tần và servo cùng hoạt động. D1000 giúp trả nguợc năng luợng sinh ra trog quá trình hãm tái sinh về luới thay vì tiêu tán năng lượng này duới dạng nhiệt một cách vô ích. Do vậy D1000 không chỉ giúp ta giảm điện năng tiêu thụ mà còn giúp bảo vệ môi truờng.
Đặc điểm kỹ thật:
Dải công suất:
3 phase-200V: 5.0 ~ 130 Kw
3 phase-400V: 5.0 ~ 630 Kw
Khả năng quá tải: 150% rated output for one minute, 200% for 3s.
Phưong pháp điều khiển: sin-ware PWM control
Truyền thông:
Standard: RS – 422/485 Modbus
Option: DeviceNet, CanOpen, Profibus-DP…
Keypad : standard multi-lingual, full text remote LCD, copy function.
Nhiệt độ: – 10 ~ 50 0C
Độ ẩm: ~ 95%
Bảo vệ:
Fuse burnout
Instantaneous Overcurrent: 250% of rated output current
Overload Protection: 150% rated output for one minute
Over-voltage and Power Loss Protection
Overtemperature Protection
Ground Fault Protection
Tiêu chuẩn an toàn: UL508C, IEC61800-5-1, IEC61800-3
Tính năng:
Tiết kiệm năng luợng bằng cách sử dụng năng luợng tái sinh:
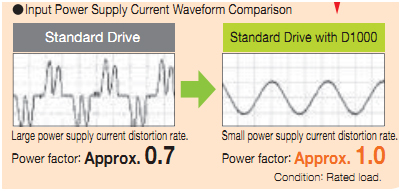
Hệ số công suất cao, triệt tiêu sóng hài.
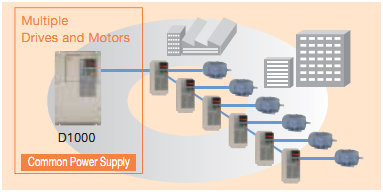
D1000 có thể kết nối với nhiều biến tần hoặc servo với điện áp DC ổn định, năng luợng trả về từ thiết bị này có thể đựuoc sử dụng cho thiết bị khác.
Dễ dàng giám sát theo dõi các thông số vận hành avà tiết kiệm năng luợng bằng ngõ ra analog hoặc qua truyền thông.
Tiết kiệm không gian lắp đặt, tiết kiệm thời gian bảo duỡng so với các hệ thống sử dụng điện trở xả.
Posted on Tháng Ba 13, 2014 by Cung cấp thiết bị tự động hóa
AC Servo Yaskawa Sigma 2 làm tăng năng suất sản xuất và làm cho dây chuyền sản xuất của bạn đạt hiệu suất cao nhất. Sigma 2 với khả năng đáp ứng cực nhanh và nâng cấp thuật toán điều khiển mới nhất.






























 ♦ Các giải pháp kĩ thuật tổng thể (system engineering)
♦ Các giải pháp kĩ thuật tổng thể (system engineering)